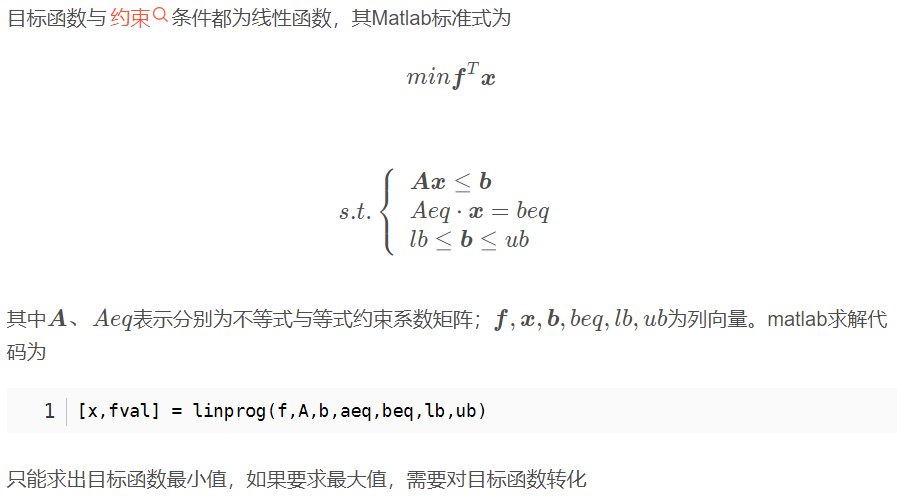
matlab求解最优化函数
- linprog
- intlinprog
- quadprog
- fminbnd
- fmincon
- fseminf
- fminunc
- fminmax
线性规划
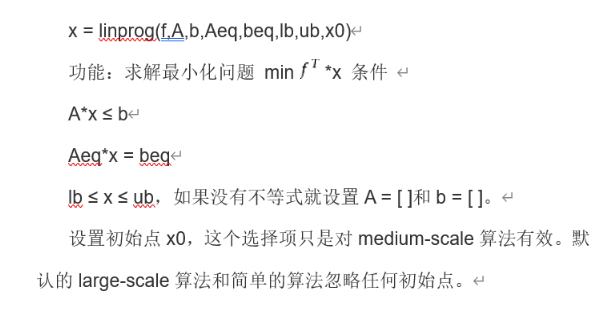
一般形式
加x0的形式
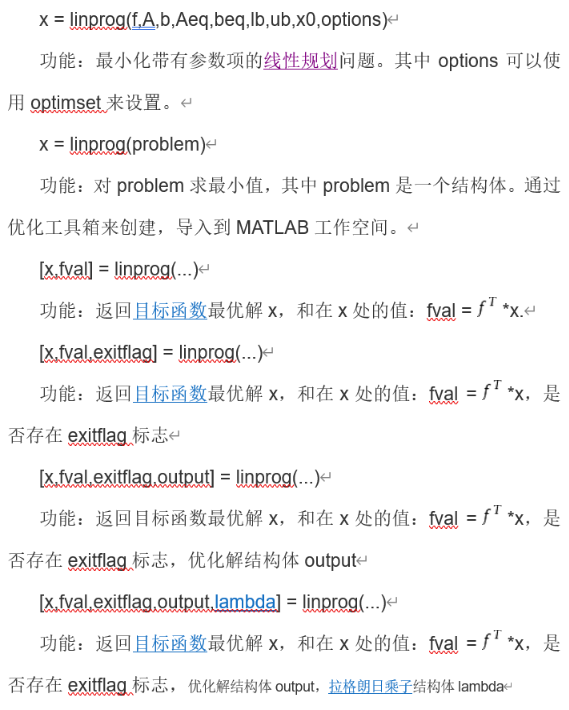
其他形式
有约束
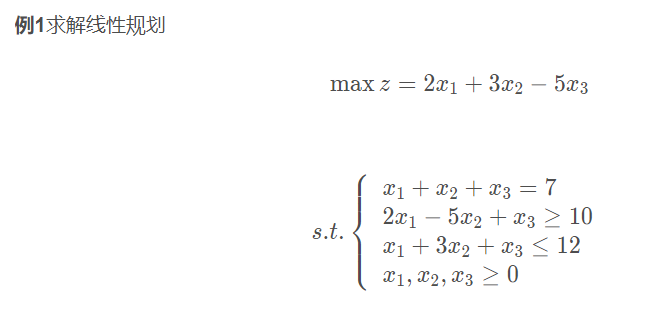
实例1
题目
代码
% 规划问题与matlab%---------------------线性规划------------------% 线性规划求解% 例1clc;clear;close all;f = [-2; -3; 5]; %matlab的向量为列向量A = [-2, 5, -1; 1, 3, 1]; %系数矩阵b = [-10, 12]; % 常数项Aeq = [1, 1, 1]; % 等式矩阵beq = 7; %等式对应的常数向量l = zeros(3, 1);u = [];[x,y] = linprog(f, A, b, Aeq, beq, l, u) %zeros(3,1)解的下限都为正
实例2
题目
代码
xxxxxxxxxxclear;f = [3;-1;-1];A = [1,-2,1;4,-1,-2];b = [11,-3];Aeq = [-2,0,1];beq = 1;l = zeros(3, 1);u = [];[x, y] = linprog(-f, A, b, Aeq, beq, l, u)
实例2
题目
代码
xclear;clc;close all;hold on;b = [11,-3];aeq = [-2,0,1];beq = 1;f = [3;-1;-1];
for i = 0 : 0.05 : 10 a = [i*1,-2,1;4,-1,-2]; [x,y] = linprog(-f,a,b,aeq,beq,zeros(3,1)); y = -y; plot(i, y,"*r");end
xlabel("参数");ylabel("目标函数值");hold off;
无约束
非线性规划
无约束
实例1
题目
代码
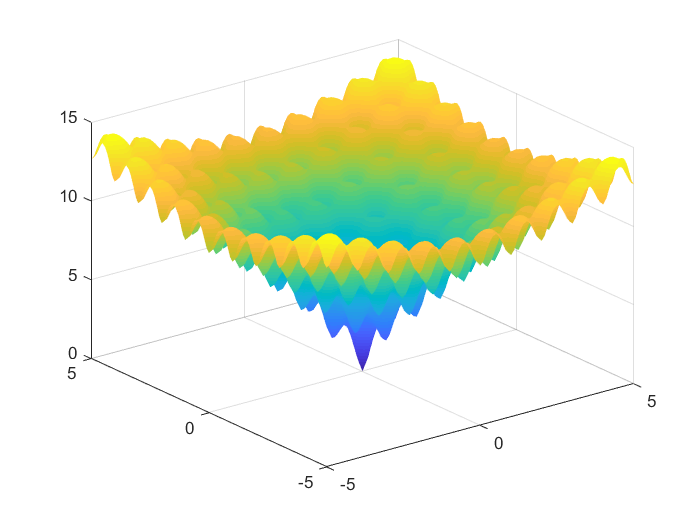
xxxxxxxxxxclear; clc; close all;%%% -5 <= x, y <= 5x = -5 : 0.1 : 5;y = -5 : 0.1 : 5;f = @(x) -20 * exp(-0.2 * sqrt(0.5 * (x(1).^2 + x(2).^2)))... - exp(0.5 * (cos(2 * pi * x(1)) + cos(2 * pi * x(2)))) + 22.713;
f1 = @(x, y) -20 * exp(-0.2 * sqrt(0.5 * (x.^2 + y.^2)))... - exp(0.5 * (cos(2 * pi * x) + cos(2 * pi * y))) + 22.713;%% 画图[X, Y] = meshgrid(x, y);Z = f1(X, Y);
surf(X, Y, Z);shading interp; %使surf绘制的 曲面图 表面光滑
figure%% 数值计算options = optimoptions('fminunc','Display','off',... 'OutputFcn',@bananaout,'Algorithm','quasi-newton');[x, fval, eflag, output] = fminunc(f, [0, 1], options)
效果
实例2
题目
代码
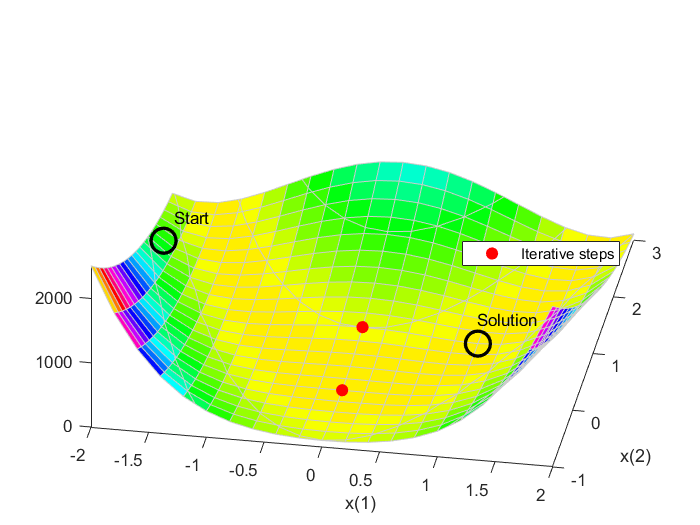
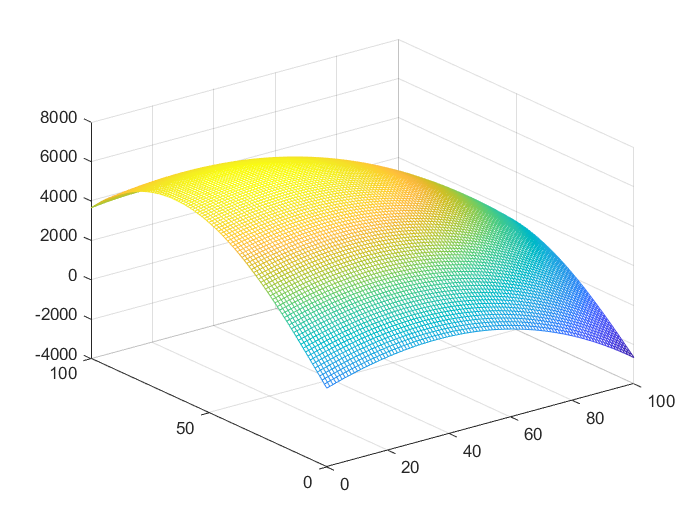
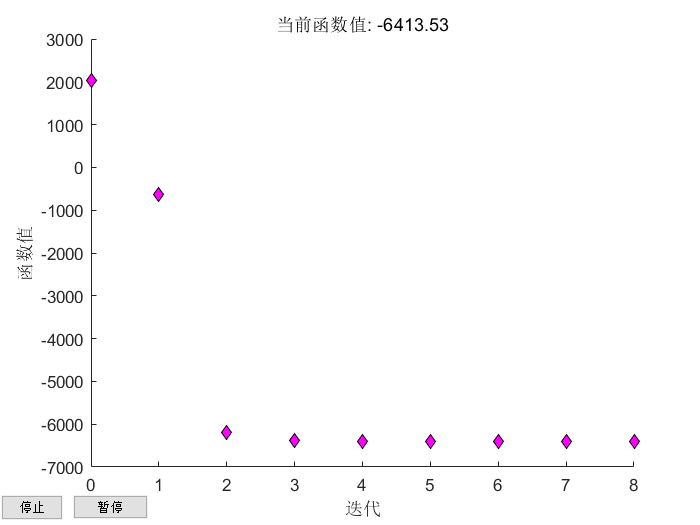
xxxxxxxxxxclear;clc;close all;%%a = [1, 0.1; 0.2, 2];b = [100, 280];r = [30, 100];landa = [0.015, 0.02];c = [20, 30];%% 匿名函数 元胞for i = 1 : 1: 2 q{i} = @(x) r(i)*exp(-landa(i) * x) + c(i); p{i} = @(x1, x2) b(i) - a(i, 1) * x1 - a(i, 2) * x2;endz = @(x1, x2) (p{1}(x1, x2) - q{1}(x1)) .* x1 + (p{2}(x1, x2) - q{2}(x2)) .* x2;z1 = @(x) -((p{1}(x(1), x(2)) - q{1}(x(1))) .* x(1) + (p{2}(x(1), x(2)) - q{2}(x(2))) .* x(2)... - (x(1)<0)*10^5 - (x(2)<0)*10^5); % 无约束变成有约束(罚函数)%% 画图x = 0:1:100;y = 0:1:100;[X, Y] = meshgrid(x, y);Z = z(X, Y);mesh(X, Y, Z);%% 数值计算% options = optimoptions('fminunc','Display','off',...% 'OutputFcn',@bananaout,'Algorithm','quasi-newton');options=optimoptions(@fminunc,'Display','iter','PlotFcns',@optimplotfval,'Algorithm','quasi-newton');[x, fval, eflag, output]=fminunc(z1, [100, 100], options);% xlim([0,2]);% ylim([0,2]);% zlim([-5000,5000])%axis([0,50,0,70,-10^4,0])效果
有约束
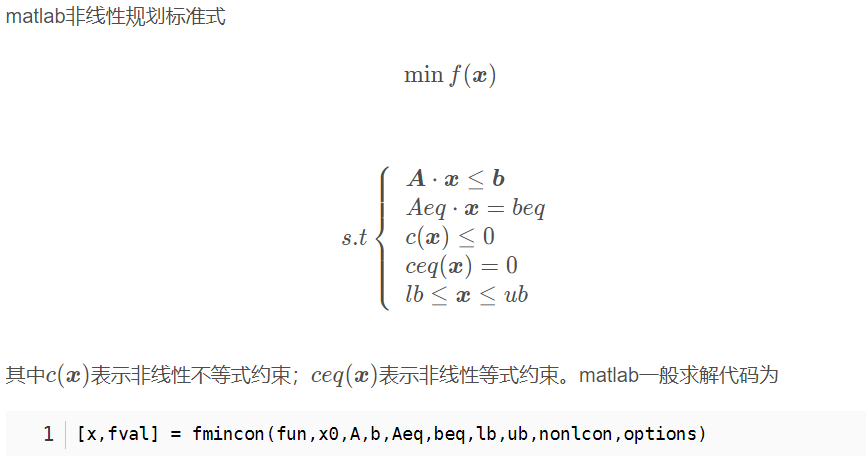
一般形式
求解过程
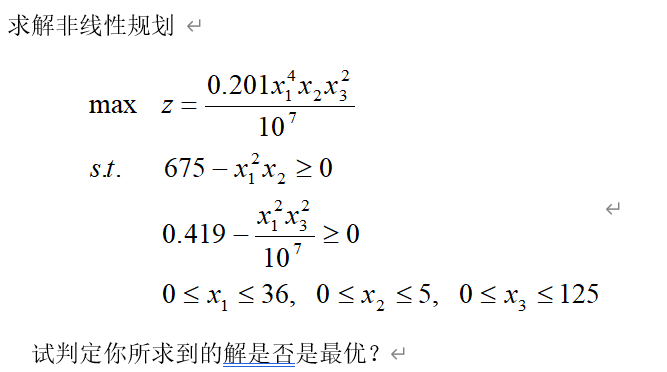
实例1
题目
代码
t_s_3_3_func函数代码
xxxxxxxxxxfunction [C,Ceq]=t_s_3_3_func(x)C(1) = x(1).^2 .* x(2) - 675;C(2) = x(1).^2 .* x(3).^2 / 1e7 - 0.419;Ceq = [];end主函数文件代码
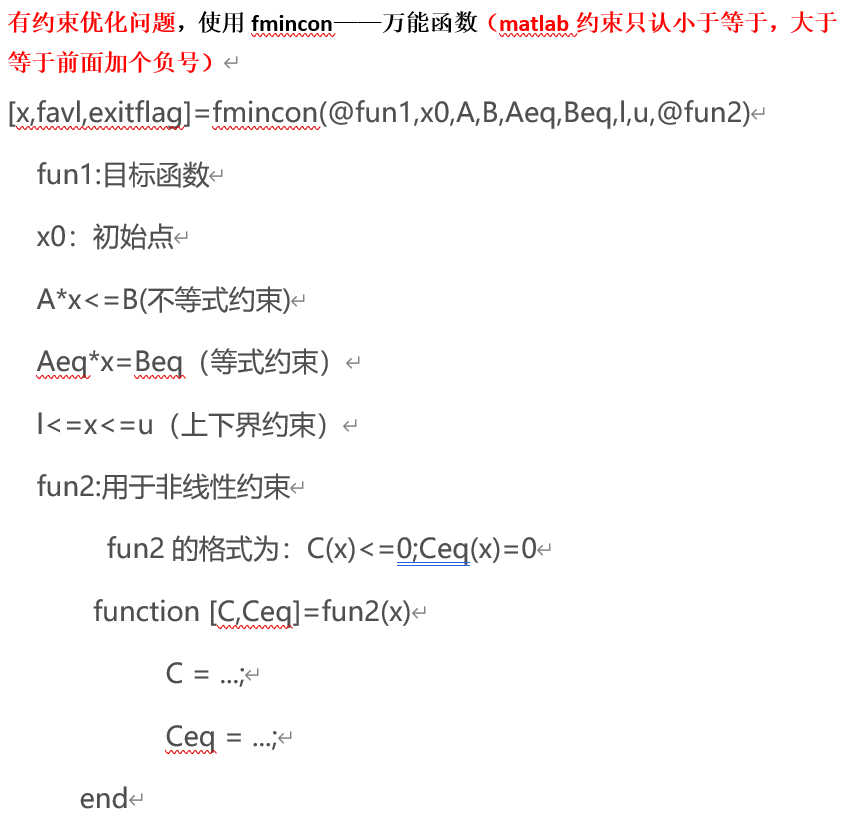
xxxxxxxxxx%{[x,favl,exitflag]=fmincon(@fun1,x0,A,B,Aeq,Beq,l,u,@fun2) fun1:目标函数 x0:初始点 A*x<=B(不等式约束) Aeq*x=Beq(等式约束) l<=x<=u(上下界约束) fun2:用于非线性约束 fun2的格式为:C(x)<=0;Ceq(x)=0 function [C,Ceq]=fun2(x) C = ...; Ceq = ...; end%}clear; clc; close all;%%fun1 = @(x) -(0.201 * x(1).^4 .* x(2) .* x(3).^2) / 1e7; %目标函数A = [];B = [];l = zeros(1,3);u = [36, 5, 125];Aeq = [];Beq = [];x0 = [0, 0, 0];%%[x,fval,exitflag] = fmincon(fun1,x0,A,B,Aeq,Beq,l,u,@t_s_3_3_func);x-fval
实例2
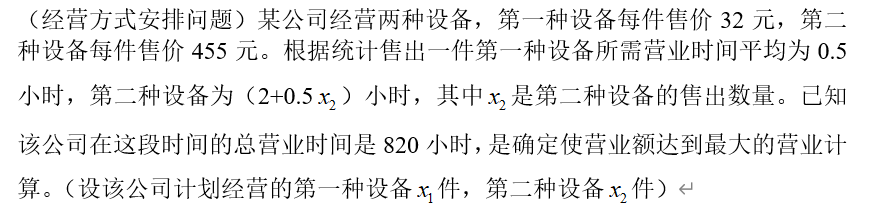
题目
代码
t_s_3_4_func函数文件代码
xxxxxxxxxxfunction [C,Ceq] = t_s_3_4_func(x)C = [];Ceq(1) = x(1) * 0.5 + x(2) .* (2 + 0.5 * x(2)) - 820;end主函数文件代码
xxxxxxxxxxclear; clc; close all;%%%{t1、t2 第一、第二种设备销售的总时间%% 模型建立t1 + t2 = 820;t1 = x1 * 0.5;t2 = x2 * (2 + 0.5 * x2);
=>x1 * 0.5 + x2 * (2 + 0.5 * x2) = 820; % 非线性约束x1 >= 0; x2 >= 0;max z = 32x1 + 455x2;%}%%func1 = @(x) -(32 * x(1) + 455 * x(2));l = [0, 0];u = [];A = [];B = [];Aeq = [];Beq = [];x0 = [0, 0];[x,fval,exitflag]=fmincon(func1,x0,A,B,Aeq,Beq,l,u,@t_s_3_4_func);x-fval
整数规划
- 数学规划中的变量(部分或者全部)限制为整数时,称为整数规划。
- 若在线性规划模型中,变量限制为整数,则称为整数线性规划。
整数线性规
一般形式
- intcon向量:intcon=[1,3,5]代表x1、x3、x5为整数
注意
把变量取值限制在[0,1]就是整数规划了。。。
例题
实例1
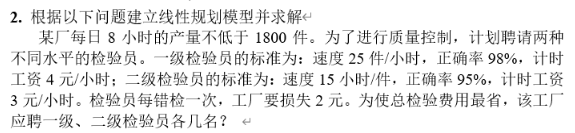
题目
代码
x
clear; clc; close all;%%% x1, x2% min z = 8*(4*x1 + 3*x2 + 2*(0.02*x1 + 0.05*x2));% x1 >= 0, x2 >= 0% 0.98*25*x1 + 0.95*15*x2 >= (1800/8)=225%%% z = @(x1, x2) 4*x1 + 3*x2 + 8*2*(0.02*x1 + 0.05*x2);C = [32 + 16*0.02, 24 + 16 * 0.05];A = -[0.98*25, 0.95*15];b = -225;Aeq = [];beq = [];l = [0, 0];u = [];intcon=[1, 2];[x, y] = intlinprog(C, intcon, A, b, Aeq, beq, l, u)结果
x
x =
9.0000 1.0000
y =
315.6800
整数规划